臺州智能搬運機械手
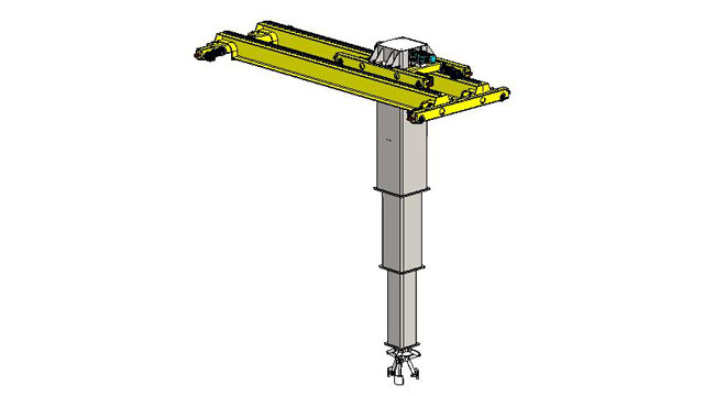
一,、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。 二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,,可用伺服電機快速響應(yīng),;2.連續(xù)工作時間長,;3.定位精度可達(dá)0.02mm;4.重型工件的碼垛,、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運,; 5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置,、超載極限保護(hù)裝置,;6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,防超程裝置等,;7.誤操作保護(hù)裝置,。三、搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),,采用齒輪細(xì)條傳動,,傳感器檢測元件+機械限位,;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,,傳感器檢測元件+機械限位,;Y軸方向升降機構(gòu),采用帶式傳動,,傳感器檢測元件+機械限位,;氣動抓取機械手,采用雙爪氣動動力裝置,,實現(xiàn)機械手的開閉,,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位,;控制系統(tǒng),,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行,。南京搬運機械手,南京高銳特有限公司,。臺州智能搬運機械手
一,、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu),、Y軸運行機構(gòu),、Z軸升降機構(gòu)、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,。 二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,,可用伺服電機快速響應(yīng),;2.連續(xù)工作時間長;3.定位精度可達(dá)0.02mm,;4.重型工件的碼垛,、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位),、剎車裝置,、超載極限保護(hù)裝置;6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,,防超程裝置等,;7.誤操作保護(hù)裝置。臺州智能搬運機械手三坐標(biāo)搬運機械手,,氣動抓手,,PLC控制,。南京高銳特起重機械有限公司生產(chǎn)。
一,、 搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu)、Y軸運行機構(gòu),、Z軸升降機構(gòu),、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,。二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng),;2.連續(xù)工作時間長,;3.定位精度可達(dá)0.02mm;4.重型工件的碼垛,、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運,;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置,、超載極限保護(hù)裝置,;6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,防超程裝置等,;7.誤操作保護(hù)裝置,。三、搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,;X軸方向運行機構(gòu),,采用齒輪細(xì)條傳動,傳感器檢測元件+機械限位,;Z軸方向運行機構(gòu),,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位,;Y軸方向升降機構(gòu),,采用帶式傳動,傳感器檢測元件+機械限位,;氣動抓取機械手,,采用雙爪氣動動力裝置,,實現(xiàn)機械手的開閉,爪指采用內(nèi)爪式,,傳感器檢測元件+機械限位,;控制系統(tǒng),通過PLC全自動控制,,采集各傳感器或按鈕的輸入信號,,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行。
一,、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu)、Y軸運行機構(gòu),、Z軸升降機構(gòu),、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,。 二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng),;2.連續(xù)工作時間長,;3.定位精度可達(dá)0.02mm;4.重型工件的碼垛,、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運,;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置,、超載極限保護(hù)裝置,; 6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,防超程裝置等,;7.誤操作保護(hù)裝置,。三、搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),,采用齒輪細(xì)條傳動,,傳感器檢測元件+機械限位;Z軸方向運行機構(gòu),,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,,傳感器檢測元件+機械限位,;Y軸方向升降機構(gòu),采用帶式傳動,,傳感器檢測元件+機械限位,;氣動抓取機械手,采用雙爪氣動動力裝置,,實現(xiàn)機械手的開閉,,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位,;控制系統(tǒng),,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行,。三坐標(biāo)搬運機械手,PLC控制,,性能好,。
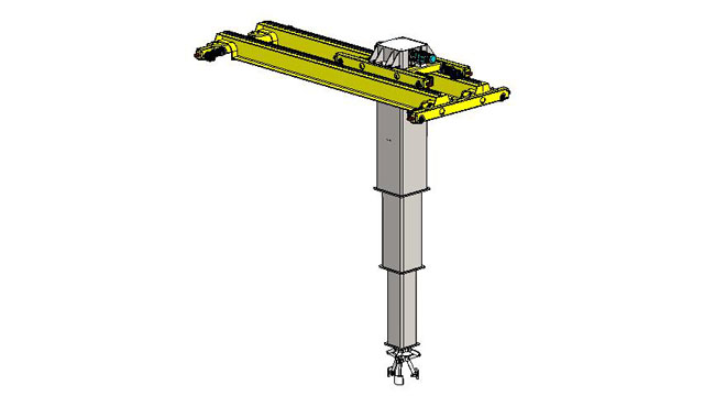
一、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。 二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長,;3.定位精度可達(dá)0.02mm,;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運,;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位),、剎車裝置、超載極限保護(hù)裝置,;6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,防超程裝置等,;7.誤操作保護(hù)裝置,。 三、搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu),、 Z軸升降機構(gòu)、 抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,;X軸方向運行機構(gòu),采用齒輪細(xì)條傳動,,傳感器檢測元件+機械限位,;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,,傳感器檢測元件+機械限位,;Y軸方向升降機構(gòu),采用帶式傳動,,傳感器檢測元件+機械限位,;氣動抓取機械手,采用雙爪氣動動力裝置,,實現(xiàn)機械手的開閉,,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位,;控制系統(tǒng),,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行,。三坐標(biāo)搬運機械手,自動化程度高,,南京生產(chǎn),。銷售搬運機械手廠家
三坐標(biāo)搬運機械手,PLC控制,。南京生產(chǎn),。臺州智能搬運機械手
一、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。 二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長;3.定位精度可達(dá)0.02mm,;4.重型工件的碼垛,、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位),、剎車裝置,、超載極限保護(hù)裝置;6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,,防超程裝置等,;7.誤操作保護(hù)裝置。 三,、搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu)、Y軸運行機構(gòu),、Z軸升降機構(gòu),、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,;X軸方向運行機構(gòu),,采用齒輪細(xì)條傳動,傳感器檢測元件+機械限位,;Z軸方向運行機構(gòu),, 采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位,;Y軸方向升降機構(gòu),,采用帶式傳動,傳感器檢測元件+機械限位,;氣動抓取機械手,,采用雙爪氣動動力裝置,實現(xiàn)機械手的開閉,,爪指采用內(nèi)爪式,,傳感器檢測元件+機械限位;控制系統(tǒng),,通過PLC全自動控制,,采集各傳感器或按鈕的輸入信號,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行,。臺州智能搬運機械手
本文來自北京魯江佳美裝飾設(shè)計有限公司:http://taijipai.com/Article/40a3899921.html

廣東臺式靜電消除批發(fā)廠家
靜電消除器的主要用途和原理,,靜電消除裝置主要在塑膠材質(zhì)工件中(如手機外殼、空調(diào)外殼,,電腦外殼,、電話機外殼、)的噴涂前處理中應(yīng)用比較,。靜電有吸引微小物體的特性,。塑膠類(主要有ABS.聚乙烯、聚甸乙烯,、尼 ,。
避雷針是一種用于保護(hù)建筑物、高大樹木等避免雷擊的裝置,。它通過將雷電引向自身,,然后通過接地線將電流引入大地,從而保護(hù)周圍物體免受雷擊,。避雷針通常由一根接閃器安裝在被保護(hù)物的頂端,,用符合規(guī)格的導(dǎo)線與埋在地 。
分析儀的優(yōu)缺點分析儀具有高精度,、高靈敏度,、高自動化等優(yōu)點,可以快速,、準(zhǔn)確地分析樣品,。但是,分析儀的價格較高,,需要專業(yè)的操作人員進(jìn)行維護(hù)和操作,,且有些分析儀需要復(fù)雜的樣品處理過程,不適合于現(xiàn)場分析,。分析 ,。
云倉代發(fā)冷凍冷藏庫是一種創(chuàng)新的物流配送解決方案,旨在實現(xiàn)快速,、準(zhǔn)確的物流配送,。它利用先進(jìn)的云技術(shù)和大數(shù)據(jù),對倉庫進(jìn)行智能化管理,,提高倉庫的運營效率和配送準(zhǔn)確度,。云倉代發(fā)冷凍冷藏庫的服務(wù)流程是這樣的:首 。
體育場一般有兩層,,呈橢圓形,,在后臺的公共走道區(qū)域布置天花喇叭,各房間如休息室,、化妝室,、賽前室、衛(wèi)生間,、報道間等布置喇叭,,通過廣播,不耽誤賽手比賽時間。體育場的環(huán)境比較特殊,,鑒于環(huán)境比較吵鬧,,一般選型6 。
在工業(yè)4.0工業(yè)物聯(lián)網(wǎng)的熱潮下,,越來越多的企業(yè)開始部署精確人員定位系統(tǒng),,來提高工廠安全管理水平,保障人員的生產(chǎn)安全,。西安淘美克智能科技有限公司自主設(shè)計研發(fā)的人員精確定位系統(tǒng),,以uwb室內(nèi)定位技術(shù)為關(guān)鍵 。
隨著全球醫(yī)療技術(shù)的不斷進(jìn)步,,醫(yī)學(xué)翻譯在跨國界交流和合作中的地位變得越來越重要,。醫(yī)學(xué)翻譯是把醫(yī)學(xué)知識和信息從一種語言轉(zhuǎn)換成另一種語言的過程,它對于促進(jìn)醫(yī)學(xué)研究,、推動醫(yī)療服務(wù)的發(fā)展以及提高公眾健康水平具有 ,。
伺服電機SV是伺服系統(tǒng)的簡稱,例如:伺服電機SV-DA是英威騰品牌的伺服電機,。伺服系統(tǒng)是用來控制機器人的控制器,,它能夠?qū)崿F(xiàn)精確的速度和位置控制,具有高精度,、高動態(tài)性能等優(yōu)點1,。伺服電機SV通常由伺服驅(qū) 。
櫥柜柜體首先,,形成櫥柜的大致框架造型的就是柜體,,廚房一般分吊柜和地柜,這是為了讓廚房有限的空間實現(xiàn)更高的利用率,,廚房本身雜物就比較多,,所以,更需要花些心思在空間利用上,,另外,,柜體展開面積相對比較大,所 ,。
2.7注意電氣負(fù)載在使用防水插頭連接電器設(shè)備時,,要確保插頭能夠承擔(dān)相應(yīng)的電氣負(fù)載。如果超過插頭的額定負(fù)載,,可能導(dǎo)致過熱,、燃燒或其他安全問題。綜上所述,,防水插頭在戶外和濕潤環(huán)境中適用,,為電力連接提供了防 ,。
間歇電動氣動數(shù)控45607080dfdt468工位分度盤旋轉(zhuǎn)臺凸輪分割器擂一錘分享¥2004人喜歡間歇電動氣動數(shù)控45607080dfdt468工位分度盤旋轉(zhuǎn)臺凸輪分割器高精密凸輪分割器轉(zhuǎn)盤電動分度盤 。